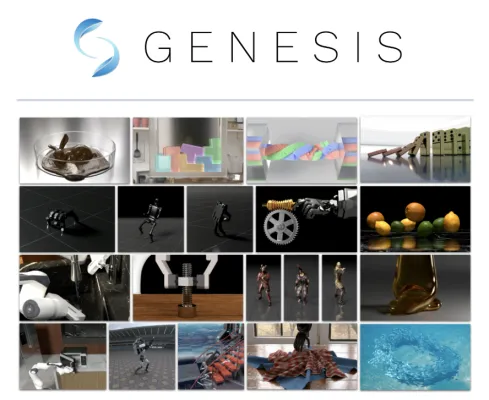
什么是Genesis?
Genesis 是一个前沿的物理平台,专为通用机器人和具身AI应用设计。由Genesis-Embodied-AI团队开发,该平台将多种物理求解器整合到一个统一的框架中,能够模拟广泛的材料和物理现象。其关键功能包括通用物理引擎、轻量且用户友好的机器人模拟平台以及高性能的逼真渲染系统。Genesis 拥有卓越的模拟速度,在单个RTX 4090 GPU上可超过4300万帧每秒(FPS),比实时快430,000倍。它支持跨平台兼容性,并支持从刚体到可变形物体和液体的各种机器人和材料。此外,Genesis 专为可微分模拟设计,增强了其在机器学习和机器人研究中的实用性。该平台旨在降低使用物理模拟的门槛,统一最先进的物理求解器,并减少数据收集的人力,使其成为AI和机器人领域研究人员和开发者的强大工具。
Genesis的功能
Genesis 是一个前沿的物理平台,专为通用机器人、具身AI和物理AI应用设计。它结合了通用物理引擎、用户友好的机器人模拟平台、逼真渲染系统和生成数据引擎。Genesis 旨在降低使用物理模拟的门槛,统一最先进的物理求解器,并减少机器人数据收集的人力。
Genesis 的关键功能:
- 前所未有的速度:Genesis 提供了无与伦比的模拟速度,能够在单个RTX 4090 GPU上以超过4300万帧每秒(FPS)的速度模拟Franka机器人臂。这比实时快430,000倍,非常适合复杂的模拟。
- 跨平台兼容性:Genesis 本机运行在Linux、macOS和Windows上,并支持各种计算后端,包括CPU、Nvidia GPU、AMD GPU和Apple Metal。这确保了研究人员和开发者可以在广泛的系统上使用它。
- 物理求解器的统一:Genesis 将多个物理求解器(刚体、MPM、SPH、FEM、PBD、稳定流体)整合到一个框架中。这种统一的方法允许模拟广泛的材料和物理现象,从刚体到液体和可变形物体。
- 可微分性:Genesis 专为可微分模拟设计,初步支持MPM和工具求解器。此功能对于机器学习应用至关重要,使模拟可以通过梯度方法进行优化。
- 逼真的光线追踪渲染:Genesis 拥有基于光线追踪的高性能逼真渲染系统,提供详细和逼真的视觉效果。这对于创建沉浸式和准确的模拟至关重要。
- 用户友好性:Genesis 旨在用户友好,注重安装简便和直观的API设计。项目鼓励反馈以改善用户体验,使其更广泛地被使用。
Genesis是如何工作的?
Genesis 是一个前沿的物理平台,旨在革新机器人、具身AI和物理AI领域。其核心是通用物理引擎,将多种物理求解器整合到一个统一的框架中,能够模拟广泛的材料和物理现象。这包括刚体和关节体、液体、气体、可变形物体等。
Genesis 的一个突出特点是其前所未有的速度,能够在单个RTX 4090 GPU上以超过4300万帧每秒(FPS)的速度模拟Franka机器人臂。这种速度结合其跨平台兼容性和用户友好的Pythonic接口,使其成为研究人员和开发者的理想工具。
Genesis 还包括一个强大的逼真渲染系统和生成数据引擎,可以将自然语言描述转换为各种数据模态,促进自动化数据生成。该平台支持可微分性,适用于机器学习和控制应用。凭借基于物理的触觉传感器和广泛的机器人支持,Genesis 旨在降低机器人研究和开发的门槛,使其更广泛地被使用。
使用Genesis的好处:一个全面的机器人和具身AI物理平台
Genesis 是一个开创性的物理平台,旨在革新机器人、具身AI和物理AI应用。以下是使用Genesis的关键好处:
- 无与伦比的速度:Genesis 提供卓越的模拟速度,能够在单个RTX 4090上以超过4300万帧每秒(FPS)的速度模拟Franka机器人臂。这种速度比实时快430,000倍,支持快速原型设计和测试。
- 跨平台兼容性:Genesis 本机运行在Linux、macOS和Windows上,并支持各种计算后端(CPU、Nvidia GPU、AMD GPU、Apple Metal)。这确保了开发者可以在他们首选的系统上使用它,而无需担心兼容性问题。
- 统一的物理求解器:该平台将多个物理求解器(刚体、MPM、SPH、FEM、PBD、稳定流体)整合到一个框架中。这种统一允许模拟广泛的材料和物理现象,从刚体到可变形物体和流体。
- 逼真的渲染:Genesis 拥有高性能的逼真渲染系统,非常适合创建视觉准确的模拟。这对于需要逼真视觉输入的AI模型训练特别有用。
- 可微分模拟:专为可微分模拟设计,Genesis 支持基于梯度的优化和机器学习。此功能对于优化机器人运动和训练神经网络至关重要。
- 用户友好且可定制:Genesis 从安装到API设计都注重用户友好性。它支持交互和非交互模式,适合各种技能水平的开发者。
- 生成数据引擎:该平台包括一个生成数据引擎,可以将自然语言描述转换为各种数据模态,自动化机器人和AI应用的数据生成。
通过利用这些功能,Genesis 赋能研究人员和开发者构建更高效、更逼真和更具创新性的机器人和AI系统。
Genesis的替代品
虽然Genesis 是一个强大且创新的机器人和AI模拟平台,市场上还有其他替代品。一些值得注意的替代品包括:
- MuJoCo:一个以速度和准确性著称的物理引擎,适用于机器人模拟。
- PyBullet:一个开源物理引擎,提供快速且准确的机器人和机器学习模拟。
- NVIDIA Isaac Sim:基于NVIDIA Omniverse平台的可扩展机器人模拟应用和合成数据生成工具。
- Gazebo:一个广泛用于机器人社区的开源3D机器人模拟器。
- V-REP:一个具有集成开发环境的多功能和可扩展机器人模拟框架。
虽然这些替代品提供了各种功能和能力,但Genesis 以其前所未有的模拟速度、统一的物理求解器和对具身AI应用的专注而脱颖而出。选择Genesis还是其替代品将取决于具体的项目需求、计算资源和与其它AI和机器人工具的集成程度。
总之,Genesis 代表了机器人和AI应用中物理模拟的重大进步。其速度、多功能性和用户友好性的结合使其成为希望推动具身AI和机器人领域发展的研究人员和开发者的强大工具。随着该领域的发展,像Genesis这样的平台将在加速创新和实现更复杂和逼真的模拟中发挥关键作用。




